서론
OpenCV에 대해 포스팅되는 글들에대해 개인적으로 분류를 해보자면 크게 두가지 부류가 있다. 하나는 “나도 이게 어떻게 되는지는 모르지만 일단 되는류” 고 나머지 하나는 “난 이미 너무 자세히 알고있어서 기초에대해 포스팅할 마음이 안생기는류“이다.
이것이 진실로 그러하든 그러하지않던 초보자에게 한글로된 문서만 보고 OpenCV입문이란 힘든다는것은 아마 대부분의 사람들이 공감할것이라 믿는다.
그래서 비교적 최신버전(3.0)에 기초하여 OpenCV가 사용하는 기본적인 함수부터 개발자가 이러한 함수를 만든 의도까지 살려서 C++ 혹은 객체지향언어의 본질을 깨달은 사람을 대상으로 “이정도 이해했으면 나머지는 알아서 할수있겠지!" 정도까지 글을 적어보려고 한다.
이 글은 시간이 날때마다 업데이트되며 이 블로그에서 OpenCV에대한 튜토리얼은 이 글 하나로 끝낼 생각이다.
또한 어느정도 주관이 들어가고 본인도 완벽히 이해하지 못하는 내용에대해서는 추측으로 글을 쓸수도 있기에 틀린내용이 있으면 댓글로 남겨주길 바란다.
설치에 대한 글은 따로 적지 않겠다. 윈도우 환경이라면 개인적으로 이 글을 추천한다.
소개
OpenCV는 인텔의 후원을 받으며 다음과 같은 목표를 가지고 있다.
Advance vision research by providing not only open but also optimized code for basic vision infrastructure. No more reinventing the wheel.
Disseminate vision knowledge by providing a common infrastructure that developers could build on, so that code would be more readily readable and transferable.
Advance vision-based commercial applications by making portable, performance-optimized code available for free—with a license that did not require to be open or free themselves.
영어 울렁증인 분들을 위해 번역해 보자면
오픈되있고 기초적인 영상처리에대한 최적화된 코드를 제공해 쓸데없는 시간낭비를 줄임으로서 진보된 영상처리 연구일것.
개발자들이 쓸수있고 일반화되서 다른 개발자들이 이해할수 있고 변형가능하게 함으로서 영상처리에관한 지식을 퍼뜨릴것.
대충 누구나 쓸수있고 코드를 꼭 공개하지 않아도 되게할것 (라이센스 관련 이야기 입니다.)
이것이 OpenCV의 기본 모토이며 실제로 잘 지키고 있으며 OpenCV자체 소개글에 의하면 2500개가 넘는 영상처리 관련 알고리즘이 최적화되서 포함되 있다고 한다.
즉, 요약하자면 우리는 복잡한 영상처리 알고리즘들을 완벽히 구현해낼 필요없이 OpenCV에서 제공하는걸 가져다 쓰면 되고, 또 이것들은 세계에 존재하는 우리만큼 (혹은 우리보다) 똑똑한 사람들이 “이것"에만 집중해서 만들어져 엄청난 최적화와 뛰어난 메모리관리가 가능한 라이브러리들의 집합체 라는것이다.
참고로 말하자면 상황에따라 개인이 집적 코딩하는게 더 효율적인 순간도 있겠지만 어지간해서는 알고리즘에대한 기초적인 이해만 가지고 OpenCV를 사용해 코딩하는게 생산성도 높고 결과물도 더 빠르다.
Mat -기초적인 이미지 저장소
기초 OpenCV자체가 영상처리에 관해 다루는 라이브러리인 만큼 “영상”, 즉 “이미지"에 대한 데이터가 저장될 장소가 일단 필요하다. OpenCV에서는 이 저장소를
Mat이라 한다. (Matrix의 앞글자만 따온것이다)(실제 Mat은 이미지 저장소로도 쓰이지만 행렬식으로써의 사용도 가능하다. 추후언급)구버전을 기준으로 OpenCV를 접하신 분들은 아마 `IplImage`의 존재를 아시는 분이 있을것이다. 둘다 이미지를 저장하고 관리하는건 같으나 다른점이 있다면 `IplImage`는 수동으로 메모리 배치와 해체를 해줌으로서 메모리 관리를 해줘야 한다면 `Mat`은 하나의 객체, 즉 `Class`로서 자체적으로 메모리관리가 가능하다는 것이다. 물론 `IplImage`의 존재가 사라진것은 아니며 그대로 쓸수있긴 하지만 OpenCV 개발자쪽에서도 이건 권장하지 않으며 프로젝트가 방대해짐에따라 메모리관리의 지옥에 빠지기 싫다면 `Mat`을 사용하도록 하자.
Mat은 이미지를 저장하는 하나의 class이며 이것은 크게 헤더와 데이터 포인터로 구성되어 있다.
헤더는 자기 자신에 저장되있는 이미지에 대한 정보를 담는 곳이다. 예를들면 “이미지 크기”, “이미지 포맷"같은것들 말이다. 그리고 데이터 포인터는 이미지 하나하나의 픽셀이 담겨있는 메모리 주소에대한 정보를 가지고 있는 곳이다.
이 두가지 부류의 정보가 담겨있는 Mat은 다음과 같이 사용가능하다.
Mat A, C; // Mat클래스 A와 C를 선언
A = imread("a.jpg", IMREAD_COLOR); // imread함수로 이미지"a.jpg"를 불러옴
Mat B(A); // B를 선언하고 A를 복사해옴
C = A; // C에 A를 대입함.
근데 여기서 한가지 주의해야할 점이 있다.
일단 imread함수를 통해 A에 “헤더"와 “데이터 포인터"가 저장된것은 좋으나 B가 A로부터 정보를 복사해갈때 이역시 “헤더"와 “데이터 포인터"만 복사가 되지 “이미지 데이터"그 자체는 복사가 안된다. 이는 C역시도 마찬가지 인데 이 일로 인해 생길수 있는 현상은 **C의 이미지 데이터를 이진화 했는데 A의 데이터도 이진화 되버리고 B역시 같아졌다!**와 같은것을 초래할수 있다.
이를 방지하기 위해
C = A.clone();
C.copyTo(A);
와 같은식으로 데이터를 통째로 복사해오면 C가 변한다 해서 A가 변하지 않고 그 반대도 마찬가지느 참고하도록 하자.
- 이미지 저장방법
Mat은 위에서 말했다싶이 Matrix에서 따온 글자임으로 그 저장방법도 행렬처럼 저장이 된다.

위 사진은 BGR*(RGB에서 순서만 바뀜)*형식의 이미지가 메모리상에 저장되는 방법이다. 보다싶이 한 픽셀에 **“파랑”,“초록”,빨강”**이 순서대로 저장되 있다.
이건 메모리 주소상으로도 마찬가지이며 만약 어떤 포인터 ptr이 (x=12,y=15) 픽셀의 파란색을 가리키고 있다면 ptr++를 해주면 그 다음위치인 (x=12,y=15) 픽셀의 초록색을 가리키게 되는 구조이다.
OpenCV에서는 이런 **“파랑”,“초록”,빨강”**같은걸 채널이라 부른다. 이경우 채널수는 3개가 되며 이 형식은 이미지의 포맷별로 다르며 임의로 자신이 구성할수도 있다.
참고로 OpenCV가 지원하는 이미지 포맷은 크게 4가지 정도가 있다.
RGB : 우리가 잘 알고있고 흔히 쓰는방법이다. 각 픽셀별로
빨강,초록,파랑을 0~255사이의 숫자로 색을 표현하는 것이다. 주의해야할 점은 OpenCV는 RGB대신 BGR(순서만 바꿈)형식으로 데이터를 저장하니 참고해 두자.HSV, HLS : 둘다 같은것으로 색상Hue, 채도Saturation, 휘도(밝기)**Value(luminance)**로 색을 표현한다. 밝기에따라 색이 달라지는 RGB와 다르게 마지막 성질만 제외하면 비교적 일정한 데이터를 얻을수 있어서 영상처리분야에 애용되는 포맷이다.
YCrCb : jpg에서 일반적으로 쓰이는 포맷이다.
CIE Lab* : 위키피디아
초기화
Mat에 이미지를 넣지 않고도 그냥 초기화 하는법도 있다.Mat M(2,2, CV_8UC3, Scalar(0,0,255));
순서대로 **“행”, “열”, “초기화 타입”, “초기화 내용”**으로 구성되며 초기화 타입의 경우 **CV_(하나의 데이터당 비트수)(Signed 인지 Unsigned 인지)C(채널수)**와 같은 형식을 가진다. 위 예제의경우 **데이터당 8비트의 저장공간을 가지고, Unsigned 형태로, 3가지 채널(RGB)를 가진다**라는 의미이다.
이걸
cout << "M = " << endl << " " << M << endl << endl;
이렇게 출력해주면
이런 형식의 데이터를 가지게 된다.
실습
다음은 웹캠동영상을 불러와 화면에 띄우는 코드이다. 쉬어가는겸 한번 해보자.
#include <opencv2/core/core.hpp>
#include <opencv2/highgui/highgui.hpp>
#include <iostream>
using namespace cv;
using namespace std;
int main(int argc, char** argv)
{
VideoCapture vc(0); //0번웹캠 초기화
if (!vc.isOpened()) return 0; // 연결실패
Mat img; //img선언
while (1) {
vc >> img; //0번웹캠에서 받은 데이터를 img에 대입
//데이터 자체를 복사하는지는 모름, 아시는분은 알려주세요.
if (img.empty()) break; //받은거 없으면 종료
imshow("cam", img); //화면에 띄우기
if (waitKey(10) == 27) break; //ESC키 눌리면 종료
}
destroyAllWindows();
return 0;
}
필터 적용해보기
앞으로 OpenCV로 영상처리를 하게되면 필터적용은 거의 필수적으로 하게될것이다. 지금은 OpenCV 공식 예제중 하나인 **“Sharpen”**에 대해 시도해 보자.
일단 **“Sharpen”**은 다음과 같은 공식을 적용하게된다.
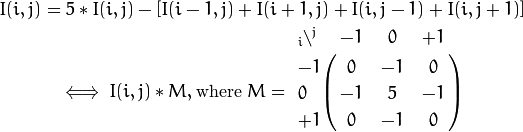
수식 울렁증인 분들을 위해 간단한 해석을 해보자면 위의식은
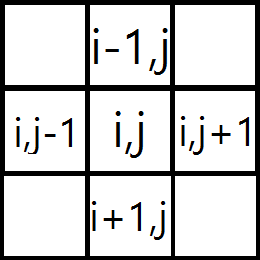
좌표평면에서 (i,j)의 픽셀에 대해 (각 화소별로) 자신의 5배에다가 사방에 있는 픽셀의 더한값을 뺀다.
를 의미한다. (아래 그림에서 좌표가 표시된것만 연산에 참여한다고 보면 된다.)
그리고 밑의식은 그걸 위 그림과 같은 배치로 행렬로 나타낸 것이다.
i,j인 자신을 5배 한뒤 그 주변의 것들을 -1배해서 더해주는 것이다. (한마디로 위, 아래 두식모두 같은 의미를 가진다.)
이를 우리는 Kernel (핵심, 알맹이) 라고 부른다.
이 식을 두가지방법으로 적용시켜 보겠다.
#include <opencv2/core/core.hpp>
#include <opencv2/highgui/highgui.hpp>
#include <opencv2/imgproc/imgproc.hpp>
#include <iostream>
using namespace cv;
using namespace std;
void Sharpen(const Mat& myImage, Mat& Result)
{
CV_Assert(myImage.depth() == CV_8U);
Result.create(myImage.size(), myImage.type());
const int nChannels = myImage.channels();
for (int j = 1; j < myImage.rows - 1; ++j)
{
const uchar* previous = myImage.ptr<uchar>(j - 1);
const uchar* current = myImage.ptr<uchar>(j);
const uchar* next = myImage.ptr<uchar>(j + 1);
uchar* output = Result.ptr<uchar>(j);
for (int i = nChannels; i < nChannels * (myImage.cols - 1); ++i)
{
*output++ = saturate_cast<uchar>(5 * current[i]
- current[i - nChannels] - current[i + nChannels] - previous[i] - next[i]);
}
}
Result.row(0).setTo(Scalar(0));
Result.row(Result.rows - 1).setTo(Scalar(0));
Result.col(0).setTo(Scalar(0));
Result.col(Result.cols - 1).setTo(Scalar(0));
}
int main(int argc, char** argv)
{
VideoCapture vc(1);
if (!vc.isOpened()) return 0; // 연결실패
Mat img;
Mat output;
Mat kern = (Mat_<char>(3, 3) << 0, -1, 0,
-1, 5, -1,
0, -1, 0);
while (1) {
vc >> img;
if (img.empty()) break;
imshow("cam", img);
if (waitKey(10) == 27) break; //ESC
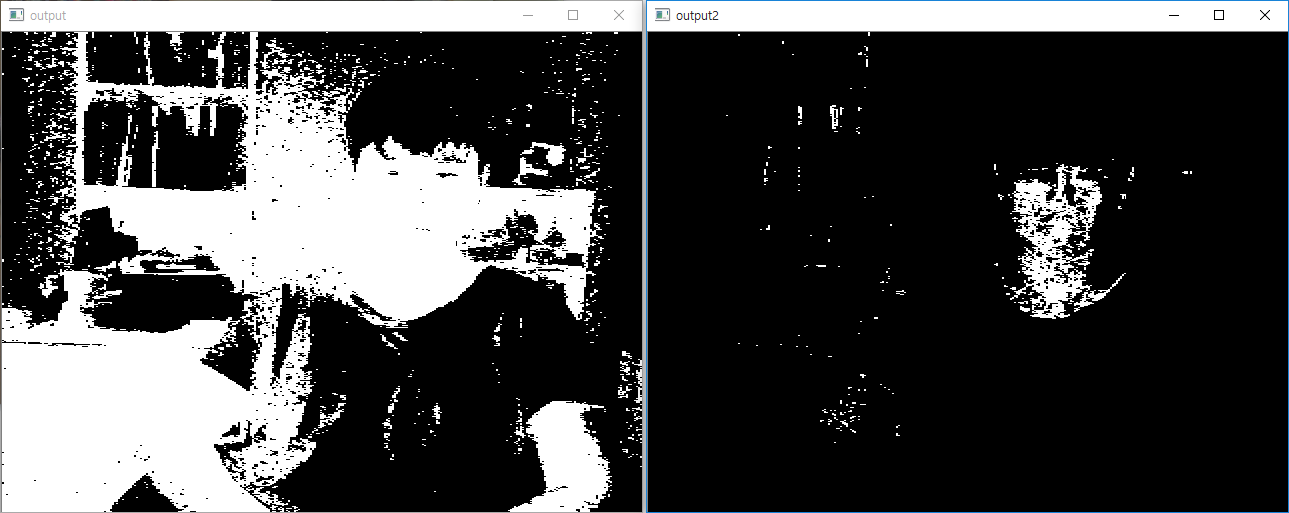
Sharpen(img, output); //위쪽의 식을 적용시킨 코드
imshow("output", output);
filter2D(img, output, img.depth(), kern); //아래쪽 식을 적용시킨 코드
imshow("output2", output);
}
destroyAllWindows();
return 0;
}
일단 위쪽식을 적용한 **Sharpen()**함수에 대해 설명해 보겠다.
CV_Assert(myImage.depth() == CV_8U);이 함수는
myImage가 CV_8U, 즉 8비트의 Unsigned 형태인지를 보고, 아니라면ERROR를Throw한다. 한마디로 계산할려는Mat이 제대로 됬는지를 확인하는 함수이다.Resaut를myImage와 같은 크기와 저장방식을 가지게 초기화 해주고,nChannels에는 채널의 수가 들어간다. 이경우BGR형태의 이미지이기 때문에nChannels에는3이 입력된다.for (int j = 1; j < myImage.rows - 1; ++j)1행부터 마지막행까지 반복
const uchar* previous = myImage.ptr<uchar>(j - 1); const uchar* current = myImage.ptr<uchar>(j); const uchar* next = myImage.ptr<uchar>(j + 1); uchar* output = Result.ptr<uchar>(j);매 반복이 시작될때마다
previous 는 자신의 윗(이전)행
current 는 자신의 행
previous 는 자신의 아랫(다음)행
을 배열로 불러오고
출력 Mat에서 자신의 행의 첫번째 픽셀의 첫번째 채널을 (*output) Unsigned char 형태로 가르킨다.
output이 가르키는 메모리 공간에5 * current[i] - current[i - nChannels] - current[i + nChannels] - previous[i] - next[i])을 대입한다.이때 위
Mat에서 메모리공간에 이미지가 저장되는 방법을 소개했을때 보여준것처럼 자신의 바로 다음공간에는 다른 채널의 데이터가 들어가 있으므로 i - nChannels을 가르킴으로서 자신 채널의 다음 픽셀을 가르키게 하는것이다.saturate_cast<>는 일종의 보호장치로 만약 연산결과가uchar가 표시가능한 0~255를 넘어갔을때 0과 255중 더 가까운 수를 리턴해주는 함수이다.그 후
output은 자신 다음의 저장공간을 가리킨다.
Result.row(0).setTo(Scalar(0));
Result.row(Result.rows - 1).setTo(Scalar(0));
Result.col(0).setTo(Scalar(0));
Result.col(Result.cols - 1).setTo(Scalar(0));
계산식의 특성상 맨 끝부분은 연산을 할수 없으므로 0을 대입해준다.
뭔가 그럴듯해보이는 함수지만 사실은 별거없는 함수다. 이런 간단한 연산을 할때 매번 이렇게 길게쓰는건 뭔가 시간낭비라고 OpenCV개발자들이 느꼈는지 kernel의 존재를 만들어내서
filter2D(img, output, img.depth(), kern);
한방으로 계산을 끝내게 해주었다.
filter2D에 대한 자세한 정의는 여기를 참고하고 지금은 간단하게 설명하자면
img랑 output은 예상한것처럼 입력물과 출력물, img.depth()는 img의 저장형식 (CV_8U 같은거)를 리턴해준다, kern은 위에서 정의했다싶이
Mat kern = (Mat_<char>(3, 3) << 0, -1, 0,
-1, 5, -1,
0, -1, 0);
의 형태를 가지며 아래식의 행렬과 똑같이 생겼다.
여기서 주의해야할 사실은 여러분은 **Sharpen()**보단 filter2D를 사용해야된다는 것이다.
이유는 두가지이다.
- 이게 더 구현하기 쉽다.
- 이게 3배정도 빠르다.
참고로 이미 **Sharpen()**도 코드상 더이상 빨라질수가 없는데 실제로 더 빠른 이유는 filter2D는 어셈블리 단계에서 최적화도 되있을뿐아니라 SIMD와 같은 CPU의 특수기능들을 적극적으로 활용해 한번에 한 픽섹을 연산하는게 아니라, 한번에 여러픽셀을 동시에 연산하기 때문이다. **Sharpen()**은 그냥 참고용으로만 봐두고 실제 사용할때는 filter2D를 적극적으로 활용하도록 하자.
**잠깐 쉬어가기**
cvtColor(img, img, CV_BGR2YCrCb);
inRange(img, Scalar(0, 133, 77), Scalar(255, 173, 127), output);
imshow("output", output);
이 코드를 실행해보자. 사람 피부색이 검출된다. 원리는 다음과 같다. BGR성분의 이미지를 색차와 휘도로 색공간을 나타내는 YCrCb로 변환한다음 여기서 (0,133,77)~(255,173,127)사이의 색만 골라서 출력하는 코드이다. 사람 피부색은 YCrCb로 표현했을때 특정 공간에 몰려있기에 가능한 것이다. RGB공간에서도 같은일을 할수있으나 YCrCb보단 정확도가 떨어진다. 단, 이 방법은 배경의 색차이때문에 나타나는 오류가 많기에 일반적인 상황에선 사용하지 않고 특수한 상황(공장에서 이미지기반 상품인식같은)에서 자주 쓰인다.
 *보다싶이 이 방법으로 **“피부만”*인식하기는 힘들다.
*보다싶이 이 방법으로 **“피부만”*인식하기는 힘들다.
OpenCV에 있는 알고리즘 사용해보기
작성중
-> 작성예정없음